This page discusses the implementation of Flink's distributed communication via Akka, which has been adopted in version 0.9. With Akka, all remote procedure calls are now realized as asynchronous messages. This mainly affects the components JobManager, TaskManager and JobClient. In the future, it is likely that even more components will be transformed into an actor, allowing them to send and process asynchronous messages.
Akka and the Actor Model
Akka is a framework to develop concurrent, fault-tolerant and scalable applications. It is an implementation of the actor model and thus similar to Erlang's concurrency model. In the context of the actor model, all acting entities are considered independent actors. Actors communicate with other actors by sending asynchronous messages to each other. The strength of the actor model arises from this asynchronism. It is also possible to explicitly wait for a response which allows you to perform synchronous operations. Synchronous messages are strongly discouraged, though, because they limit the scalability of the system. Each actor has a mailbox in which the received messages are stored. Furthermore, each actor maintains its own isolated state. An example network of several actors is given below.
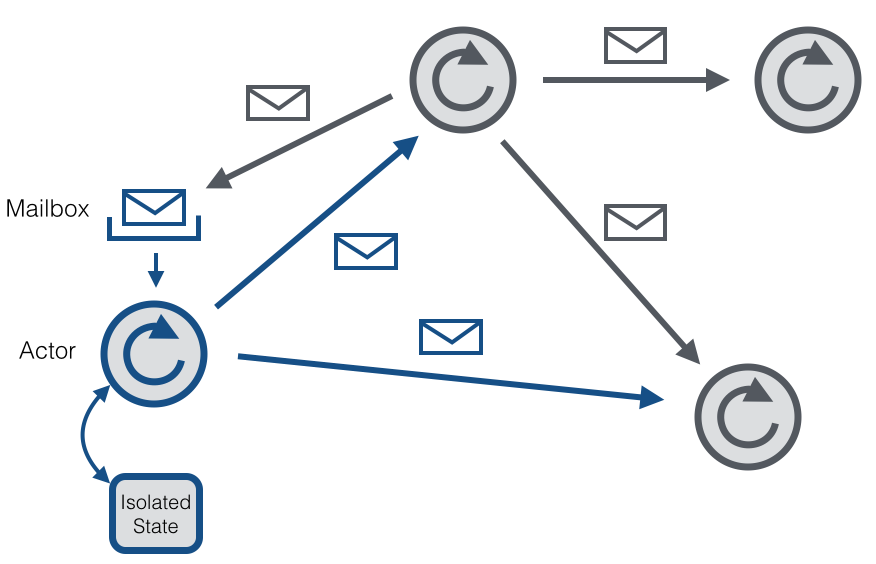
An actor has a single processing thread which polls the actor's mailbox and processes the received messages successively. As a result of a processed message, the actor can change its internal state, send new messages or spawn new actors. If the internal state of an actor is exclusively manipulated from within its processing thread, then there is no need to make the actor's state thread safe. Even though an individual actor is sequential by nature, a system consisting of several actors is highly concurrent and scalable, because the processing threads are shared among all actors. This sharing is also the reason why one should never call blocking calls from within an actor thread. Such a call would block the thread from being used by other actors to process their own messages.
Actor Systems
An actor system is the container in which all actors live. It provides shared services such as scheduling, configuration, and logging. The actor system also contains the thread pool from where all actor threads are recruited.
Multiple actor systems can coexist on a single machine. If the actor system is started with a RemoteActorRefProvider, then it can be reached from another actor system possibly residing on a remote machine. The actor system automatically recognises whether actor messages are addressed to an actor living in the same actor system or in a remote actor system. In the case of local communication, the message is efficiently transmitted using shared memory. In the case of remote communication, the message is sent through the network stack.
All actors are organized in a hierarchy. Each newly created actor gets its creating actor assigned as its parent. The hierarchy is used for supervision. Each parent is responsible for the supervision of its children. If an error occurs in one of its children, then the parent gets notified. If the actor can resolve the problem, then the parent can resume or restart its child. In case of a problem that is out of his scope to deal with, it can escalate the error to its own parent. Escalating an error simply means that a hierarchy layer above the current one is now responsible for resolving the problem. Details about Akka's supervision and monitoring can be found here.
The first actors created by the system are supervised by the guardian actor /user which is provided by the system. The actor hierarchy is explained in depth here. For more information about actor systems in general look here.
Actors in Flink
An actor is itself a container for state and behaviour. Its actor thread sequentially processes the incoming messages. It alleviates the user from the error-prone task of locking and thread management because only one thread at a time is active for one actor. However, one must make sure that the internal state of an actor is only accessed from this actor thread. The behaviour of an actor is defined by a receive function which contains for each message some logic which is executed upon receiving this message.
The Flink system consists of three distributed components which have to communicate: The JobClient, the JobManager and the TaskManager. The JobClient takes a Flink job from the user and submits it to the JobManager. The JobManager is then responsible for orchestrating the job execution. First of all, it allocates the required amount of resources. This mainly includes the execution slots on the TaskManagers.
After resource allocation, the JobManager deploys the individual tasks of the job to the respective TaskManagers Upon receiving a task, the TaskManager spawns a thread which executes the task. State changes such as starting the calculation or finishing it are sent back to the JobManager. Based on these state updates, the JobManager will steer the job execution until it is finished. Once the job is finished, the result of it will be sent back to the JobClient which tells the user about it. The job execution process is depicted in the figure below.

JobManager & TaskManager
The JobManager is the central control unit which is responsible for executing a Flink job. As such it governs the resource allocation, task scheduling and state reporting.
Before any Flink job can be executed, one JobManager and one or more TaskManager have to be started. The TaskManager then registers at the JobManager by sending a RegisterTaskManager message to the JobManager. The JobManager acknowledges a successful registration with an AcknowledgeRegistration message. In case that the TaskManager is already registered at the JobManager, because there were multiple RegisterTaskManager messages sent, an AlreadyRegistered message is returned by the JobManager. If the registration is refused, then the JobManager will respond with a RefuseRegistration message.
A job is submitted to the JobManager by sending a SubmitJob message with the corresponding JobGraph to it. Upon receiving the JobGraph, the JobManager creates an ExecutionGraph out of the JobGraph which serves as the logical representation of the distributed execution. The ExecutionGraph contains the information about the tasks which have to be deployed to the TaskManager in order to be executed.
The JobManager's scheduler is responsible for allocating execution slots on the available TaskManagers. After allocating an execution slot on a TaskManager, a SubmitTask message with all necessary information to execute the task is sent to the respective TaskManager. A successful task deployment is acknowledged by TaskOperationResult. Once the sources of the submitted job are deployed and running, also the job submission is considered successful. The JobManager informs the JobClient about this state by sending a Success message with the corresponding job id.
State updates of the individual task running on the TaskManagers are sent back to the JobManager via UpdateTaskExecutionState messages. With these update messages, the ExecutionGraph can be updated to reflect the current state of the execution.
The JobManager also acts as the input split assigner for data sources. It is responsible for distributing the work across all TaskManager such that data locality is preserved where possible. In order to dynamically balance the load, the Tasks request a new input split after they have finished processing the old one. This request is realized by sending a RequestNextInputSplit to the JobManager. The JobManager responds with a NextInputSplit message. If there are no more input splits, then the input split contained in the message is null.
The Tasks are deployed lazily to the TaskManagers. This means that tasks which consume data are only deployed after one of its producers has finished producing some data. Once the producer has done so, it sends a ScheduleOrUpdateConsumers message to the JobManager. This messages says that the consumer can now read the newly produced data. If the consuming task is not yet running, it will be deployed to a TaskManager.
JobClient
The JobClient represents the user facing component of the distributed system. It is used to communicate with the JobManager and as such it is responsible for submitting Flink jobs, querying the state of the submitted jobs and receiving status messages of the currently running job.
The JobClient is also an actor with which you communicate via messages. There exist two messages related to job submission: SubmitJobDetached and SubmitJobWait. The first message submits a job and de-registers from receiving any status messages and the final job result. The detached mode is useful if you want to submit your job to a Flink cluster in a fire and forget manner.
The SubmitJobWait message submits a job to the JobManager and registers to receive status messages for this job. Internally this is done by spawning a helper actor which is used as the receiver of the status messages. Once the job has terminated, a JobResultSuccess with the duration and the accumulator results is sent to the spawned helper actor by the JobManager. Upon receiving this message, the helper actor forwards the message to the client which issued the SubmitJobWait message initially and then terminates.
Asynchronous vs. Synchronous Messages
Wherever possible, Flink tries to use asynchronous messages and to handle responses as futures. Futures and the few existing blocking calls have a timeout after which the operation is considered failed. This prevents the system from getting deadlocked in case a message gets lost or a distributed component crashes. However, if you happen to have a really large cluster or a slow network, timeouts might be triggered wrongly. Therefore, the timeout for these operations can be specified via "akka.ask.timeout" in the configuration.
Before an actor can talk to another actor it has to retrieve an ActorRef for it. The lookup for this operation requires also a timeout. In order to make the system fail fast if an actor is not started, the lookup timeout is set to a smaller value than the regular timeout. In case that you experience lookup timeouts, you can increase the lookup time via "akka.lookup.timeout" in the configuration.
Another peculiarity of Akka is that it sets a limit for the maximum message size it can send. The reason for this is that it reserves a serialization buffer of the same size and does not want to waste memory. If you should ever encounter a transmission error because the message exceeded the maximum size, you can increase the framesize via "akka.framesize" in the configuration.
Failure Detection
Failure detection in a distributed system is crucial for its robustness. When running on a commodity cluster, it can always happen that some of the components fail or are no longer reachable. The reasons for such a failure are polymorphic and can reach from hardware breakdown to network outages. A robust distributed system should be able to detect failed components and recover from it.
Flink detects failed components by using Akka's DeathWatch mechanism. DeathWatch allows actors to watch other actors even though they are not supervised by this actor or even living in a different actor system. Once a watched actor dies or is no longer reachable, a Terminated message is sent to the watching actor. Consequently, upon receiving such a message, the system can take steps against it. Internally, the DeathWatch is realized as heartbeat and a failure detector which, based on the heartbeat-interval, hearbeat-pause and failure threshold, estimates when an actor is likely to be dead. The heartbeat-interval can be controlled by setting the "akka.watch.heartbeat.interval" value in the configuration. The acceptable heartbeat-pause can be specified via "akka.watch.heartbeat.pause". The heartbeat-pause should be a multiple of the heartbeat-interval, otherwise a lost heartbeat directly triggers the DeathWatch. The failure threshold can be specified via "akka.watch.threshold" and it effectively controls the sensitivity of the failure detector. More details about the DeathWatch mechanism and the failure detector can be found here.
In Flink, the JobManager watches all registered TaskManagers and the TaskManagers watch the JobManager. This way, both components know when the other component is no longer reachable. The JobManager reacts by marking the respective TaskManager as dead which prevents that future tasks are deployed to it. Moreover, it fails all tasks which are currently running on this task manager and reschedules their execution on a different TaskManager. In case that the TaskManager was only marked dead because of a temporary connection loss, then it can simply re-register itself at the JobManager once the connection has been re-established.
The TaskManager also watches the JobManager. This monitoring allows the TaskManager to enter a clean state by failing all currently running tasks when it detects a failed JobManager. Additionally, the TaskManager will try to reconnect to the JobManager in case that the triggered death was only caused by network congestion or a connection loss.
Future Development
At the moment, only three components, the JobClient, JobManager and TaskManager, are implemented as actors. In order to better exploit concurrency while improving scalability, it is conceivable to realize more components as actors. A promising candidate could be the ExecutionGraph whose individual ExecutionVertices or even the associated Execution object could be implemented as an actor. Such a fine-grained actor model would have the advantage that the state updates could be directly sent to the respective Execution object. This way, the JobManager would be noticeably relieved from being a single point of communication.
Configuration
akka.ask.timeout:Timeout used for all futures and blocking Akka calls. If Flink fails due to timeouts then you should try to increase this value. Timeouts can be caused by slow machines or a congested network. The timeout value requires a time-unit specifier (ms/s/min/h/d) (DEFAULT: 100 s).akka.lookup.timeout:Timeout used for the lookup of the JobManager. The timeout value has to contain a time-unit specifier (ms/s/min/h/d) (DEFAULT: 10 s).akka.framesize: Maximum size of messages which are sent between the JobManager and the TaskManagers. If Flink fails because messages exceed this limit, then you should increase it. The message size requires a size-unit specifier (DEFAULT: 10485760b).akka.watch.heartbeat.interval: Heartbeat interval for Akka's DeathWatch mechanism to detect dead TaskManagers. If TaskManagers are wrongly marked dead because of lost or delayed heartbeat messages, then you should increase this value. A thorough description of Akka's DeathWatch can be found here (DEFAULT: akka.ask.timeout/10).akka.watch.heartbeat.pause: Acceptable heartbeat pause for Akka's DeathWatch mechanism. A low value does not allow a irregular heartbeat. A thorough description of Akka's DeathWatch can be found here (DEFAULT: akka.ask.timeout).akka.watch.threshold: Threshold for the DeathWatch failure detector. A low value is prone to false positives whereas a high value increases the time to detect a dead TaskManager. A thorough description of Akka's DeathWatch can be found here (DEFAULT: 12).akka.transport.heartbeat.interval: Heartbeat interval for Akka's transport failure detector. Since Flink uses TCP, the detector is not necessary. Therefore, the detector is disabled by setting the interval to a very high value. In case you should need the transport failure detector, set the interval to some reasonable value. The interval value requires a time-unit specifier (ms/s/min/h/d) (DEFAULT: 1000 s).akka.transport.heartbeat.pause: Acceptable heartbeat pause for Akka's transport failure detector. Since Flink uses TCP, the detector is not necessary. Therefore, the detector is disabled by setting the pause to a very high value. In case you should need the transport failure detector, set the pause to some reasonable value. The pause value requires a time-unit specifier (ms/s/min/h/d) (DEFAULT: 6000 s).akka.transport.threshold: Threshold for the transport failure detector. Since Flink uses TCP, the detector is not necessary and, thus, the threshold is set to a high value (DEFAULT: 300).akka.tcp.timeout: Timeout for all outbound connections. If you should experience problems with connecting to a TaskManager due to a slow network, you should increase this value (DEFAULT: akka.ask.timeout).akka.throughput: Number of messages that are processed in a batch before returning the thread to the pool. Low values denote a fair scheduling whereas high values can increase the performance at the cost of unfairness (DEFAULT: 15).akka.log.lifecycle.events: Turns on the Akka's remote logging of events. Set this value to 'on' in case of debugging (DEFAULT: off).akka.startup-timeout: Timeout after which the startup of a remote component is considered being failed (DEFAULT: akka.ask.timeout).